
설치 환경
- Ubuntu 18.04
- ROS Melodic
- OpenCV 3.2.0
Pangolin 설치
https://github.com/stevenlovegrove/Pangolin
GitHub - stevenlovegrove/Pangolin: Pangolin is a lightweight portable rapid development library for managing OpenGL display / in
Pangolin is a lightweight portable rapid development library for managing OpenGL display / interaction and abstracting video input. - GitHub - stevenlovegrove/Pangolin: Pangolin is a lightweight po...
github.com
빌드 도구 및 glew 라이브러리 설치
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install build-essential cmake unzip pkg-config
sudo apt install libglew-dev
Pangolin을 복제 후 설치
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
git checkout v0.5
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j4
sudo make install
ORB_SLAM3를 위한 라이브러리 설치
https://github.com/UZ-SLAMLab/ORB_SLAM3
GitHub - UZ-SLAMLab/ORB_SLAM3: ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM - GitHub - UZ-SLAMLab/ORB_SLAM3: ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and...
github.com
sudo apt-get install libeigen3-dev
sudo apt install libpython2.7-dev
sudo apt install libboost-all-dev
sudo apt install libgl1-mesa-dev
sudo apt-get install cmake libsuitesparse-dev qtdeclarative5-dev qt5-qmake
sudo apt install libssl-dev
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
ORB_SLAM3를 복제
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
ORB_SLAM3/CMakeLists.txt파일을 파일 탐색기를 통해 열고 아래와 같이 수정
find_package(OpenCV 4.4)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()
부분을
find_package(OpenCV 3.2)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 3.2 not found.")
endif()
와 같이 수정 (Opencv 3.2.0을 사용하기 때문에 위와 같이 수정해야 build 가능)
ORB SLAM3 설치 (Warning 메시지 무시)
cd ORB_SLAM3
chmod +x build.sh
./build.sh
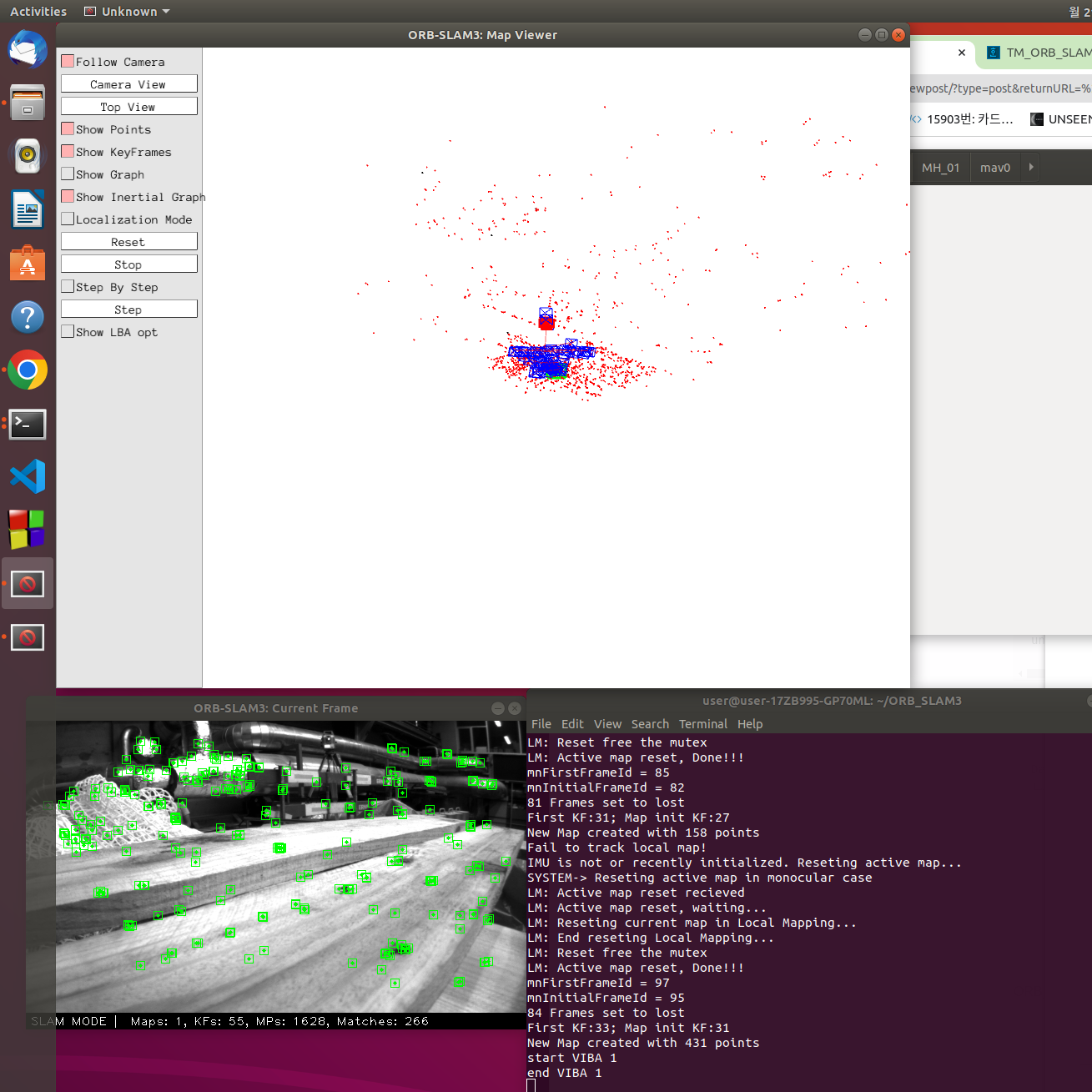
빌드 테스트
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
kmavvisualinertialdatasets – ASL Datasets
The EuRoC MAV Dataset This web page presents visual-inertial datasets collected on-board a Micro Aerial Vehicle (MAV). The datasets contain stereo images, synchronized IMU measurements, and accurate motion and structure ground-truth. Those data sets were p
projects.asl.ethz.ch
위 데이터 셋 제공 사이트에서 데이터를 다운 받아 ORB SLAM3의 빌드 테스트를 진행한다.
cd ORB_SLAM3
mkdir Dataset
cd Dataset
wget -O MH_01.zip http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_01_easy/MH_01_easy.zip
unzip MH_01.zip
압축을 해제한 데이터 셋의 디렉터리 경로를 아래와 같이 구성해야한다.
Dataset
└── MH_01
└── mav0
├── body.yaml
├── cam0
├── cam1
├── imu0
├── leica0
└── state_groundtruth_estimate0
ORB_SLAM3 디렉터리에서 아래와 같은 명령어를 입력한다. (Monocular-Inertial인 경우)
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml ./Dataset/MH_01/ ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt
'잡다한이야기' 카테고리의 다른 글
| MURERbot 리뷰 (4) | 2024.11.16 |
|---|---|
| [SLAM] ORB_SLAM3 With Realsense D435i (1) | 2024.01.15 |
| [Mac] Window 11 가상환경 설치 (0) | 2023.10.07 |